Como Saber se um Sistema Não Linear é Estável: Pontos de Equilíbrio e Linearização
Como Estudar Pontos de Equilíbrio em Sistemas Não Lineares: Um Guia Para Engenheiros e Cientistas
A análise de pontos de equilíbrio em sistemas dinâmicos não lineares é um dos pilares para entender o comportamento de fenômenos físicos, mecânicos, biológicos e até econômicos. Se você é estudante de engenharia ou atua com modelagem de sistemas reais, provavelmente já se deparou com equações diferenciais não lineares e se perguntou: como sei se um sistema é estável ou instável? Ou ainda, como simplificar esse sistema próximo de um ponto de equilíbrio?
Neste artigo, vamos caminhar por quatro tópicos fundamentais para que você domine a análise local de sistemas não lineares, com aplicações práticas e claras. E no final, veremos um exemplo clássico: o pêndulo simples.
1. Como Encontrar os Pontos de Equilíbrio em Sistemas Não Lineares
Um ponto de equilíbrio é um ponto do espaço de estados onde o sistema permanece inalterado ao longo do tempo, se nele for inicialmente colocado.
Dado um sistema de equações diferenciais da forma:
![\[\dot{\mathbf{x}} = \mathbf{f}(\mathbf{x})\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-037b43bbd6413d5ea25bb0b057b466ef_l3.png "Rendered by QuickLaTeX.com")
os pontos de equilíbrio são encontrados resolvendo a equação:
![\[\mathbf{f}(\mathbf{x}_e) = 0\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-667ac397ba8a05bb446d7839884b9e9e_l3.png "Rendered by QuickLaTeX.com")
Ou seja, devemos encontrar os pontos  em que a derivada é zero — ou seja, o sistema está “parado”. Essa tarefa exige resolver um sistema não linear de equações, o que pode envolver álgebra simbólica ou métodos numéricos, dependendo da complexidade da função
em que a derivada é zero — ou seja, o sistema está “parado”. Essa tarefa exige resolver um sistema não linear de equações, o que pode envolver álgebra simbólica ou métodos numéricos, dependendo da complexidade da função  .
.
2. Estabilidade: Autovalores e Autovetores ao Redor do Equilíbrio
Uma vez que os pontos de equilíbrio foram determinados, a próxima pergunta natural é: esses pontos são estáveis ou instáveis? Para responder isso, usamos a matriz Jacobiana do sistema avaliada no ponto de equilíbrio.
Seja:
![\[J = \left. \frac{\partial \mathbf{f}}{\partial \mathbf{x}} \right|_{\mathbf{x} = \mathbf{x}_e}\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-182920718b97c53dcbf0b0f00dc0f404_l3.png "Rendered by QuickLaTeX.com")
A matriz  contém as derivadas parciais das funções que regem a dinâmica. A análise dos autovalores de nos dá a resposta:
contém as derivadas parciais das funções que regem a dinâmica. A análise dos autovalores de nos dá a resposta:
- Se todos os autovalores têm parte real negativa: o ponto é estável (atraente).
- Se algum autovalor tem parte real positiva: o ponto é instável.
- Se há autovalores com parte real nula, a análise deve ser aprofundada (por exemplo, via métodos de Lyapunov).
Essa abordagem vem da teoria linear de sistemas, mas funciona bem para entender o comportamento local próximo ao ponto de equilíbrio, mesmo em sistemas não lineares.
3. Linearização de Sistemas Não Lineares
Para simplificar a análise e o projeto de controle, é comum linearizar o sistema próximo a um ponto de equilíbrio. Isso significa que aproximamos o sistema original não linear por um sistema linear de primeira ordem com o mesmo comportamento local.
A linearização é dada por:
![\[\dot{\mathbf{x}} \approx J (\mathbf{x} - \mathbf{x}_e)\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-3ff6f026fc0d6f1cffe9ff99cc7493b3_l3.png "Rendered by QuickLaTeX.com")
onde é a matriz Jacobiana já descrita, e  é a perturbação em torno do ponto de equilíbrio.
é a perturbação em torno do ponto de equilíbrio.
Essa equação é uma boa aproximação quando as perturbações são pequenas. Em muitas aplicações práticas, como sistemas de controle e osciladores mecânicos, essa linearização permite análises rápidas e implementação de estratégias de controle.
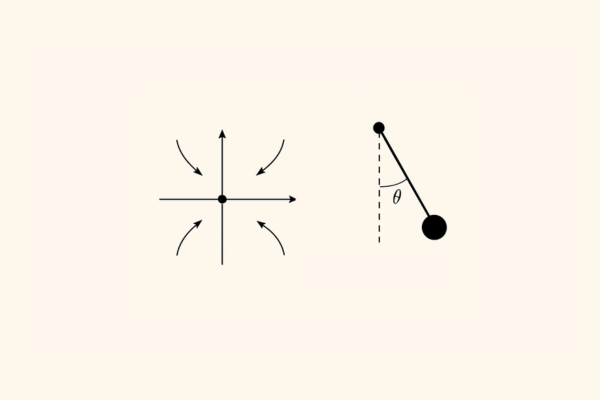
4. Exemplo Clássico: O Pêndulo Simples
Considere a equação do pêndulo simples sem atrito:
![\[\theta'' + \frac{g}{L} sen(\theta) = 0\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-44ebe5ab497d1669ea28f49606454b84_l3.png "Rendered by QuickLaTeX.com")
Queremos encontrar os pontos de equilíbrio. Para isso, basta resolver:
![\[sen(\theta) = 0 \Rightarrow \theta = n\pi, \quad n \in \mathbb{Z}\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-c7e057f5f0e2a3bfa5e0626ac771e062_l3.png "Rendered by QuickLaTeX.com")
Vamos focar nos dois primeiros pontos:
 : posição para baixo
: posição para baixo : posição invertida (para cima)
: posição invertida (para cima)
A estabilidade pode ser analisada pela linearização da equação em torno de . Aproximamos  (para
(para  pequeno), o que nos dá:
pequeno), o que nos dá:
![\[\theta'' + \frac{g}{L} \theta = 0\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-6a548fe09274a8c11071ca90c1ad25ed_l3.png "Rendered by QuickLaTeX.com")
Essa é uma equação linear com solução oscilatória, típica de sistemas estáveis. A frequência natural é:
![\[\omega_n = \sqrt{\frac{g}{L}}\]](https://digitalinformacao.com/wp-content/ql-cache/quicklatex.com-662a06be4ccbc1c59ea7ca37932c56f7_l3.png "Rendered by QuickLaTeX.com")
Já para , a aproximação local é  , o que leva a uma equação com coeficiente negativo — indicando instabilidade.
, o que leva a uma equação com coeficiente negativo — indicando instabilidade.
Assim, concluímos:
- : ponto de equilíbrio estável
- : ponto de equilíbrio instável
Conclusão
Neste artigo, você aprendeu como:
- Encontrar os pontos de equilíbrio de sistemas não lineares;
- Usar autovalores da matriz Jacobiana para analisar estabilidade;
- Linearizar sistemas para facilitar análise e controle;
- Aplicar esse conhecimento ao exemplo clássico do pêndulo simples.
Este é apenas o começo! Com esse tipo de análise, você pode investigar modelos complexos como sistemas aeroespaciais, robôs, estruturas flutuantes e muito mais.
Se esse conteúdo fez sentido para você, deixe um comentário abaixo!